Halo semua.
Kenalkan saya Daniel.
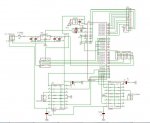
Saya ingin menanyakan tentang mikrokontroler. Saya memiliki 2 sensor usirr dan 1 ping ultrasonik dan sudah berhasil memprogramnya yang ditampilkan ke lc2X16 dengan atmega16,crstal 4MHz dan baskom CAVR. Saya ingin membuat robot wall follower. Untuk motor, saya gunakan motor tamia 3V dan motor driver saya gunakan L293D mode paralel 2 biji( 1 ic motor driver mendrive 1 motor).
Ketika ada perubahan arah gerakan motor seperti dari maju kemundur(adanya tegangan spike), mikrokontrolernya eror sehingga sensor berhenti membaca. Yang saya tau, untuk menghilangkan tegangan spike itu, perlu digunakan H-bridge. Sementara ic L293D itu menggunakan prinsip H-bridge. Dan saya sudah menambahkan kapasitor ditiap input ic motor driver L293D untuk menekan tegangan spike itu.
Dan saat dari maju ke mundur,,tegangan output regulator(LM2940) bergoyang.
Yang menjadi pertanyaan saya, mengapa eror itu terjadi dan bagaimana cara mengatasinya?
Terimakasih
Kenalkan saya Daniel.
Saya ingin menanyakan tentang mikrokontroler. Saya memiliki 2 sensor usirr dan 1 ping ultrasonik dan sudah berhasil memprogramnya yang ditampilkan ke lc2X16 dengan atmega16,crstal 4MHz dan baskom CAVR. Saya ingin membuat robot wall follower. Untuk motor, saya gunakan motor tamia 3V dan motor driver saya gunakan L293D mode paralel 2 biji( 1 ic motor driver mendrive 1 motor).
Ketika ada perubahan arah gerakan motor seperti dari maju kemundur(adanya tegangan spike), mikrokontrolernya eror sehingga sensor berhenti membaca. Yang saya tau, untuk menghilangkan tegangan spike itu, perlu digunakan H-bridge. Sementara ic L293D itu menggunakan prinsip H-bridge. Dan saya sudah menambahkan kapasitor ditiap input ic motor driver L293D untuk menekan tegangan spike itu.
Dan saat dari maju ke mundur,,tegangan output regulator(LM2940) bergoyang.
Yang menjadi pertanyaan saya, mengapa eror itu terjadi dan bagaimana cara mengatasinya?
Terimakasih